Po delší pauze přinášíme další článek o malých zástavbových EFISech. Tentokrát se Přemysl Truksa podíval na český výrobek od společnosti JE Avionics.
Malé zástavbové EFISy: JE Avionics Horizon 80 (Zdroj: Aeroweb.cz)
Když jsem loni v srpnu narazil na sletu LAA na 57 mm EFIS od firmy JE Avionics z Lanškrouna, byl jsem rozhodnutý, že o něm musím napsat článek. Bohužel díky pracovním povinnostem jsem se k tomu nedostal až do konce roku. A když na psaní konečně došlo, kontaktoval jsem výrobce s tím, zda by mi mohl pro článek poskytnout nějaké fotografie. Tak se obratem stalo ovšem zároveň s upozorněním, že během pár týdnů bude k dispozici 80 mm verze a zda nechci s psaním článku počkat. Tak se také stalo, a proto vám nyní chci popsat necertifikovaný přístroj, který perfektně „pasuje“ do naší série článků o malých EFISech.
Jak už jsem uvedl, na Horizon a jeho tvůrce jsem narazil na srpnovém sletu LAA v Jihlavě. Zašel jsem se podívat spíše jen ze zvědavosti, ovšem pak už mě čekala jen příjemná překvapení: velmi přesvědčivé zpracování, použité softwarové algoritmy jednotky, snaha o zachování jednoduchosti přístroje, vynikající cena. Možná budete mít po přečtení tohoto článku stejně jako já pocit, že je tím úplně nejdůležitějším v celé sérii.
(Zdroj: JE Avionics)
Popis přístroje
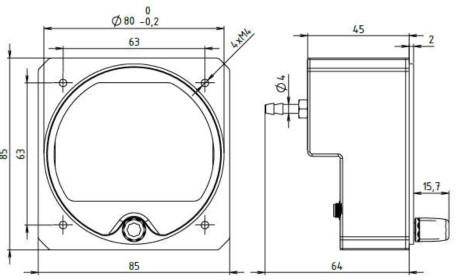
Přístroj má rozměr 85 x 85 mm a hloubku 45 mm a je uložen v duralovém pouzdře z lehkých slitin. Výřez v přístrojovém panelu je kulatý a nad přístrojový panel vystupuje pouze otočný enkodér. TFT IPS displej s rozlišením 320 x 240 pixelů je v této velikosti velice ostrý, svítivost 1000 cd/m2 se zdá být průměrnou, ale panel je i v přímém slunečním světle velice dobře čitelný a ve srovnání s některými jinými displeji
s touto svítivostí výrazně lepší. Což jen potvrzuje zkušenost, že dle některých výrobců „papír snese vše“. Rozlišení je v dané kategorii standardní, ale „zrnitost“ displeje je eliminována použitím tzv. anti-aliasingu (vyhlazením) a zobrazení je podle mě nejlepší v kategorii necertifikovaných přístrojů. Úroveň podsvícení displeje je nastavitelná.
(Zdroj: JE Avionics)
Na předním panelu je pouze otočný enkodér, kterým se ovládají všechny funkce.
(Zdroj: JE Avionics)
Na zadní straně jsou vstupy pro Pitotovu trubici a snímač statického tlaku, SMA konektor GPS antény a napájecí konektor. Požadované napájení je 8–30 V DC. Proudový odběr při plném podsvícení je 200 mA při 12 V (2.4 W).
Jednotka s dvoujádrovým procesorem disponuje barometrickým čidlem s extrémním rozlišením 24 bitů a relativní přesnost barometru je tak ± 0,1 metru! Rozsah nastavení QNH je od 900 do 1100 hPa.
Určení indikovaných úhlů klonění, klopení a zatáčení je prováděno matematickou syntézou údajů z gyroskopu (měřících úhlovou rychlost) a akcelerometrů (měřících zrychlení). Údaje z gyroskopů jsou integrovány cca. 300x za sekundu, s předpokladem konstantní úhlové rychlosti mezi jednotlivými iteracemi. Veškeré elektronické MEMS gyroskopy však vykazují chybu, která se s každou další iterací kumuluje. Z tohoto důvodu jsou naměřené údaje korigovány fixní veličinou – zemskou gravitací – měřenou akcelerometry. Jelikož však na letadlo během letu působí další prvky inerciálních zrychlení (např. při zatáčce, zrychlování), je nutné tato zrychlení separovat od zrychlení gravitačního. K tomu účelu je brána v potaz pravá vzdušná rychlost, případně v omezené míře i traťová rychlost. Úhel je stanovován na základě syntézy údajů z GPS a gyroskopů, údaje zatáčkoměru pak z gyroskopů. Akcelerometr má měřící rozsah ± 8 g.
Díky pokročilým softwarovým algoritmům reaguje přístroj velmi rychle a přitom není “utřepaný”. Přesnost přístroje je poměrně špatně měřitelná, ale pokud si prohlédnete srovnávací videa výrobce, můžete si udělat obrázek sami.
Seznam „obrazovek“ Horizonu je bohatý: sdružené zobrazení, jehož základem je horizont (PFD), dále je k dispozici indikátor směru letu (HSI), výškoměr, rychloměr, logbook, G-metr a chronometr.
Primární displej (PFD)
Samozřejmostí je zobrazení podélného a příčného sklonu. Dále jsou zobrazeny rychlosti (IAS a GS), indikace pádové rychlosti pro aktuální násobek, výška, vertikální rychlost, traťový úhel, zatáčkoměr a „kulička“ příčného sklonoměru, tíhové zrychlení G a hodnota nastaveného QNH. Dále je indikována případná ztráta GPS signálu, čas letu.
(Zdroj: JE Avionics)
Rozložení informací stejně jako barevné provedení je standardní. Náklony jsou zobrazeny na umělém horizontu. Rozteč značek na umělém horizontu je po 2.5, 5 a 10 stupních. Na levé straně je zobrazen sloupec indikované vzdušné rychlosti (IAS). Rychlost je zobrazena jak na posuvné stupnici, tak i přesným údajem v jejím středu. Zároveň je vlevo vedle stupnice zobrazen barevně kódovaný pásek operačních rychlostí (nastavitelný). V levém spodním rohu je zobrazena rychlost vůči zemi (GS) a nad ní je zobrazena doba letu. Přístroj také varuje před pádovou rychlostí. Při rychlosti pod 15 km/h nad aktuální pádovou rychlostí se objeví u údaje rychlosti IAS žluté pole a nastavitelně také začne pomalé pípání, které se plynule zrychluje a při rychlosti pod 5 km/h nad aktuální pádovou rychlostí přejde v trvalý tón. Tento tón je vydáván, dokud rychlost neklesne pod 20 km/h pod VS0. Velmi důležité je, že pádová rychlost je určována s ohledem na aktuální tíhový násobek. Rychlosti mohou být zobrazeny v km/h nebo v uzlech.
Horní část displeje je vyhrazena pro informace o horizontální poloze. Číselná hodnota aktuálního traťového úhlu (určeného z dat GPS) je zobrazena hodnotou na horizontálně posuvném kompasu. Pod kompasem je horizontální indikátor zatáčkoměru.
Informace o vertikální poloze letadla jsou v pravé části PFD. Nadmořská výška je opět zobrazena jak na posuvné stupnici, tak i přesným údajem v jejím středu. Indikace vertikální rychlosti je zobrazena jako fialový svislý indikátor vlevo od stupnice nadmořské výšky. Nad číselným údajem je pak zobrazena hodnota vertikální rychlosti v m/s. Rozsah indikátoru je ±5 m/s. Výška může být zobrazena v metrech nebo stopách. Ve spodní části je „kulička“ relativního příčného sklonoměru a pod ní hodnota tíhového zrychlení G, vpravo vedle ní pak hodnota QNH.
Indikátor směru letu (HSI)
Indikátor směru letu slouží k zobrazování traťového úhlu dle dat z GPS. Pro pokrytí prudkých změn směrů jsou pro rychlou odezvu použity rovněž údaje z gyroskopů. Pro správnou funkci je tedy nutná přítomnost GPS signálu a rychlost nad 10 km/h. Pokud je rychlost nižší (nebo pokud je letadlo v klidu) měření směru je nepřesné; tento stav je indikovaný stupnicí indikátoru se sníženou intenzitou.
Po zapnutí přístroje s letadlem v klidu je vždy indikován traťový úhel 360 neboť informace o směru nejsou z důvodu absence pohybu k dispozici. Po prvním překonání rychlosti 10 km/h se stupnice stočí správným směrem. Pokud dojde za letu ke ztrátě GPS signálu je přes celou obrazovku zobrazen červený kříž. Na zemi je tento stav indikován varováním „NO GPS“.
(Zdroj: JE Avionics)
Zajímavou a velmi důležitou funkcí indikátoru směru letu je možnost navigace na vybrané letiště v ČR. Výběr letiště je proveden otočným enkodérem, kdy se po jeho stisku pilot přepne do podnabídky a tam vybere volbu Navigace. Poté je zobrazen seznam letišť seřazený od aktuálně nebližšího letiště po nejvzdálenější. Pro každé letiště je uvedena zkratka, název, vzdálenost, odhadovaná doba letu k letišti a potřebný kurz. Po výběru požadované destinace dojde k návratu na výchozí obrazovku a nestavení indikátoru do příslušného směru (jak číselně, tak graficky). Tento směr se průběžně mění dle aktuální polohy letadla. Rovněž je zobrazena aktuální vzdálenost (DST) ke zvolenému cíli. Pro zrušení navigace je nutné opět vstoupit do submenu a zvolit možnost „STOP NAVIGATION“. Databáze zahrnuje 92 letišť ČR. Pokud není funkce Navigace aktivována, fialový ukazatel požadovaného směru (HDG BUG) lze nastavit přímo otočením enkodéru.
Výškoměr a variometr
První z jednoúčelových obrazovek je výškoměr s variometrem. Zobrazení přejímá logiku PFD a variometr je tak zobrazen v levé a výškoměr v pravé polovině displeje. Údaje variometru jsou prezentovány jak graficky, pomocí stupnice s ručičkou, tak číselně. Při překročení stupnice (nad + / - 5 m/s) je zobrazena bílá šipka směrem nahoru nebo dolů. Vpravo nahoře je zobrazeno nastavené QNH a dole výška z přijímače GPS.
Zdroj (JE Avionics)
Rychloměr
Stejně jako na PFD, rychloměr zobrazuje IAS jak ve formě vertikálního indikátoru se stupnicí a barevným proužkem operačních rychlostí, tak i přesným číselným údajem. Vpravo nahoře je zobrazena rychlost vůči zemi (GS). Vynikající je zobrazení blízkosti pádové rychlosti pro aktuální násobek. Při rychlosti vyšší než 15 km/h nad aktuální pádovou rychlostí (pro daný násobek) je ručička zelená a zcela na spodním okraji stupnice. Při poklesu rychlosti pod tuto hranici ručička stoupá a plynule přechází přes žlutou do červené barvy. Při rychlosti nižší než 5 km/h je rovněž zobrazen nápis „STALL“. Pádová rychlost je určována ve vztahu k VS1. Jak už bylo zmíněno, pro určení aktuální pádové rychlosti je brán v úvahu momentální násobek a v ostré zatáčce nebo po přitažení tak varování přichází na vyšší rychlosti. Bez ohledu na aktuálně zvolenou obrazovku je toto varování volitelně doprovázeno i akustickou indikací.
Zdroj: JE Avionics)
Logbook
Funkce Logbook slouží k zaznamenání vybraných parametrů posledních 50 letů. Jednotlivé lety jsou ohraničeny vzletem, který je detekován v případě, že rychlost naroste o více než 20 km/h nad VS1 a přistáním, kdy naopak rychlost poklesne o více než 20 km/h pod VS0. Pro každý let jsou zapisovány a zobrazovány následující hodnoty – číslo letu (z celkového počtu posledních 50 letů), datum, čas vzletu a přistání, doba letu, maximální dosažená rychlost, maximální pozitivní násobek G a maximální dosažená výška.
Zdroj: JE Avionics)
G-metr
Aktuální zrychlení v příčné ose je zobrazeno jak na obloukové stupnici, tak i číselným údajem. Maximální a minimální hodnoty G jsou zobrazovány jako číselný údaj. Hodnoty jsou platné pro daný let a při každém zapnutí přístroje jsou resetovány. Překročení násobku nad/pod hodnoty +3G / -1G je volitelně indikováno přerušovanou akustickou indikací, překročení nad/pod +3.5G / -1.5G pak trvalou.
Chronometr
Zobrazuje UTC čas z přijímače GPS, letový čas a stopky. Čas letu se spíná automaticky, jakmile dojde k nárustu rychlosti IAS 20 km/h nad VS1. Při zapnutí se nastaví čas na 0:00:10 (bere se v potaz čas nutný k rozjedu a odpoutání). Po přistání se měření času letu pozastaví v případě poklesu IAS 20 km/h pod VS0. Čas se opět spustí po opětovném překročení rychlosti IAS o 20 km/h nad VS1. Otočením enkodéru doleva dojde v případě běžících stopek k pozastavení stopek. Dalším otočení doleva dojde k vynulování stopek. Otočením doprava se stopky zapnou (resp. obnoví, pokud byly pozastaveny).
(Zdroj: JE Avionics)
Přehled jednotlivých obrazovek s ukázkou činnosti je moc pěkně vidět na následujícím videu.
(Zdroj: JE Avionics)
Propojení s tabletem nebo chytrým telefonem
Přístroj je možné prostřednictvím vestavěné Wifi propojit s telefonem či tabletem s operačním systémem Android. Prostřednictvím aplikace HORIZON je možné zrcadlit základní obrazovku PFD. Z principu jsou zobrazované údaje zpožděny o cca. 100–200 ms. Z tohoto důvodu také výrobce zakazuje požívat zrcadlené údaje jako primární letová data. Přesto si však dokážu představit situace, kdy tablet umístěný vpravo před instruktorem najde využití.
(Zdroj: JE Avionics)
Návod a podpora
Návod k přístroji je poměrně stručný, přesto však velice jasný a přímočarý a věřím, že ovládání nebude problémem pro žádného pilota. Instalace je také popsána velmi dobře a průměrně technicky zdatný člověk by ji měl bez problémů zvládnout. Vynikající je možnost podpory v češtině a podle své dosavadní zkušenosti věřím, že výrobce je ochotný naslouchat připomínkám uživatelů na možný další vývoj a vylepšení přístroje.
Závěr
Horizon 80 má při ceně 20 850 korun nejlepší poměr cena / výkon a dokonce si myslím, že v současné době je to i jeden z nejlepších necertifikovaných přístrojů vůbec. Snad mi laskavý čtenář promine poslední, veskrze subjektivní, poznámku: Jsem nadšen z toho, že malá česká firma dokáže vyvinout přístroj, který může s přehledem konkurovat světové špičce. A pokud by výrobce doladil pár detailů (možnost zobrazení vertikální rychlosti v fpm, zobrazení rychlosti v mph, podpora více letišť neomezená pouze na Českou republiku), jsem přesvědčen, že by dosáhl výrazného rozšíření v globálním měřítku.
Autor se živí jako vývojář programového vybavení pro zkušebny vozidel a motorů. Jeho koníčkem jsou věškeré létající aparáty těžší vzduchu a je šťastným držitelem licence PPL.
Nevím jestli bych to označil za nejlepší malý EFIS. Vypadá to sice relativně pěkně a na těch porovnávacích videích to reaguje svižně, ale má to určité neduhy.
Předně z toho podle fotek nelze vyčíst úhel náklonu (bank angle). Chybí tam ta stupnice nahoře kterou umělý horizont normálně má. Řekl bych že je to jedna z hlavních funkcí umělého horizontu.
Dále používání kombinace jednotek Altitude [ft] a VS v [m/s] nedává vůbec smysl. Jak si v hlavě budu počítat za jak dlouho proklesám rychlostí 3 m/s, 5000 ft výšky. Nedává větší smysl počítat s 500 ft/min? Obdobně fixní jednotky pro GS [km/h] nedávají smysl v kombinaci s volitelnou jednotkou IAS [kts]. Pokud je IAS v [kts] tak stejnou jednotku má mít i GS, jinak je to matoucí.
Na PFD chybí zobrazení HDG (TRK) bugu a chybí ALT bug. Indikace pádu připomíná barvou a umístěním trend vector IAS a může za něj být zaměněn! Samotná indikace bude nejspíše jen odhadnuta vzhledem k absenci čidla AoA.
Taky by si mohli sjednotit barvičky trend vektorů. Proč TRK (ne HDG!) má žlutou a VSI růžovou? Tedy jestli měřítko zatáčkoměru odpovídá měřítku HDG (TRK!) stupnice - jinak to je matoucí a jen to vzbuzuje dojem trend vectoru. Taky umísťovat trend vector VSI mimo ALT stupnici a to ještě v jiných jednotkách je při nejmenším nepraktické. U Garminů trend vector ukazuje kde bude daný údaj za 6 s a ukazuje to tak na všech údajích IAS, ALT i HDG a u všech stejnou barvou. Odpovídá to 6s i tady u VSI?
S tím souvisí to "HSI". Tím že to bere údaje z GPS a ne z magnetometru tak to neukazuje heading (HDG) ale track (TRK). V tom je podstatný rozdíl a nemělo by se to zaměňovat. Otázka je zda by vlastně ten přístroj měl "HSI" režim bez magnetometru vůbec mít. Ano je to užitečné, ale rozhodně to není to co pilot čeká pokud se na ten přístroj v tomto módu podívá.
Podobně i to popsané chování "HDG" bugu (ve skutečnosti TRK bug) nejspíše neodpovídá zvyklostem. U HSI se předpokládá že navigace je znázorněna šipkou přes střed směřující k vyžadovanému TRK (pokud není známá vzdálenost od trasy např. ADF - jinak je to doplňené o deviation bar např. VOR, ILS, GPS). Znázorňovat HDG (TRK!) bug růžově kdy jednou to znamená GPS NAV a jednou HDG (TRK!) bug je při nejmenším matoucí. Ne nadarmo má HDG bug svou barvu (světle modrou) a svůj tvar a navigační zdroje mají také svoje barvy a tvar šipky. Taky by měl mít HDG (TRK!) bug stále svou funkci nehledě na navigaci, tady ta značka totálně změní význam a bug tak přestane zcela fungovat.
S tím souvisí absence sériové linky. Pokud to má primitivní navigaci a HDG (TRK!) bug, tak je hrozná škoda že to nelze použít pro GNSS stearing autopilota.
Další věcí, nejspíše jen článku a ne přístroje, je otázka jak může přístroj brát při výpočtech v potaz pravou vzdušnou rychlost (TAS) pokud nemá teplotní čidlo OAT. Bez toho přeci nelze TAS spočítat.
Je dost dobrý důvod k tomu nezobrazovat GPS ALT. Bez SBAS systémů to má dost velkou chybu a až na vyjímky (RNP APPCH do LPV minim) se na to nesmí lítat. Tady to přes to zobrazuje. Pochopil bych to při nějaké detekci ucpané statiky, ale ne v běžném provozu.
Zdá se že nepodporuje násobnou montáž, to je vzhledem k počtu funkcí docela škoda.
Z hlediska síťové bezpečnosti je fixní PSK klíč 12345678 špatně. Zařízení má display a může mít vlastní vygenerované heslo do sítě a zobrazovat ho v menu. Takto lze na tyto horizonty automatizovaně útočit. Není také popsán postup aktualizace FW. Z toho lze usuzovat že to není uživatelsky proveditelné. To je taktéž bezpečnostní problém!
Netvrdím tím že je to špatný přístroj, ale má to své podstatné chyby které pilot který s EFIS létá uvidí. Stejně tak i nedostatky v bezpečnosti zařízení uvidí každý člověk z IT. Základ je zdá se dobrý, ale chce to doladit.
Dobrý den Martine, pokud si článek pozorně přečtete, neměl by jste nikde najít informaci, že přístroj zobrazuje magnetický kurz. Celkem hodně jsem si dával záležet na tom, abych uváděl, že se jedná o informaci z GPS. Nicméně máte pravdu, bylo by vhodnější použít spojení 'traťový úhel' místo 'traťový kurz' a požádám redakci, aby to změnila. (V případě kdy jsem zmínil HDG BUG se jedná o informaci o požadovaném, nikoliv o aktuálním, kurzu). Podobně i v manuálu je velmi jasně napsáno, že se jedná o informaci z GPS, pilota by tedy tato informace zmást neměla.Co se týká GPS výšky, tam to vidím přesaně naopak (ale uznávám, že to je čistě subjektivní názor): pokud se bude zobrazovat stále, pilot si může "zvyknout" na její odchylky a v případě krizové situace s ní takto i pracovat. Pokud by se mu zobrazila až při výpadku statiky by to naopak mohl chápat jako plnohodnotnou náhradu a to by rozhodně nebyklo dobře. Otázka hackerského útoku na horizont v UL letadle ponechám bez komentáře.
jakožto zástupce výrobce bych vám tímto chtěl poděkovat za podnětný a velmi detailní komentář. Vašimi připomínkami se budeme určitě zabývat a dovedu si představit, že část z nich zakomponujeme do budoucí verze softwaru.
Část Vašich připomínek je však paradoxně rovněž aplikovatelná i na jiné přístroje z autorova seriálu o malých EFISech. S ohledem na jejich polularitu mezi běžnými piloty ultralehkých letadel je tedy opodstatnění některých připomínek poněkud diskutabilní. Z vlastní zkušenosti mohu říci, že každý pilot má jiné požadavky a je obtížné splnit mnohdy zcela protichůdná očekávání.
Ještě jednou děkuji za Váš kometář, který pro nás bude do budoucna jistě přínosem.
Děkuji za odpověď, předně k tomu rozporu mezi HDG a TRK. Ve článku to máte napsáno správně, ale přístroj sám to používá blbě. Můžete to vidět v "HSI" módu vpravo dole.
To zmatení pilota beru tak že pokud létá něco jiného s magnetometrem a sedne do SLZ vybaveného tímto přístrojem tak je matoucí že DGI/HSI ukazuje TRK místo HDG. O to víc že na displayi je napsán HDG. Nedělám si iluze o tom že by si pilot přečetl manuál k horizontu. Obávám se že pokud se pilot podívá na toto "DGI/HSI" tak si bez toho přečtení manuálu bude říkat že to je opravdu HDG, protože na DGI/HSI je přeci vždy HDG.
Tím že to nemá ten magnetometr tak tak je vlastně jen TRK BUG ne HDG BUG, to je každopádně nepříliž podstatný detail.
U té GPS výšky se obávám že by to milně někdo mohl považovat za přešnější a létat podle toho. Přeci jen GPS taková moderní věc oproti nepřesnému mechanickému barometrickému výškoměru. Přitom ta má bez SBAS mizernou přesnost pokud jde o výšku. Nehledě pak na vyhýbání provozu, kdy se počítá že všichni používají (správně nastavený) výškoměr. Podle mě je to vyloženě škodlivý údaj a maximálně v nouzi je to lepší než nemít vůbec nic. Ale souhlasím s tím že by tam pak mělo být napsáno varování že je to nepřesné a ideálně včetně chyby tedy +/- x ft.
Ono to ani tak není o nějakém sofistikovaném hackerském útoku. Stejně dobře to může být děcko co si z nudy pouští scripty na notebooku nebo nějaký jiný přístroj kde byl nějaký jiný vývojář stejně kreativní na PSK klíče.
Každopádně neschopnost aktualizovat FW je opravdu vážný nedostatek. Představte si že v tom FW bude nějaká závažná chyba. Nemusí to být ani v samotném SW od výrobce ale třeba v nějaké knihovně nebo třeba ve FW wifi čipu. Přístroj se třeba může v nějaké chvíli zaseknout, nebo hůř, začít hlásit blbosti. I když to pak výrobce objeví tak nebude mít jak chybu opravit aniž by ty přístroje všechny stáhnul z trhu a nepřeprogramoval u něj. Stejně tak pokud budou chtít přidat další letiště do navigace, nebo nějak upravit chování přístroje tak to u současných přístrojů už neudělají - nemají jak.
Ad HDG a HSI: Ano, máte pravdu! Na HSI vpravo dole by samozřejmě měl být popis TRK. Omlouvám se za nepozornost při psaní článku - údaj pod HDG jsem nějak automaticky považoval za požadovaný kurz k letišti (a tudíž jsem měl pocit, že je správně HDG). A přesto, že si myslím, že omlouvat cokoliv tím, že si pilot nepřečte manuál, musím s Vámi i zde souhlasit, že HDG je zavádějící. Předpokládám ale, že to je triviální úprava FW a už další vyrobený kus by mohl uvádět správný popis. Co se týká změny FW, myslím, že to výrobce nějak řeší, ale to by asi bylo lepší, aby reagoval sám, pokud si příspěvky přečte.
Dovolte mi ještě v krátkosti zareagovat na Váš komentář.
Chápu, že pilot zvyklý na IFR létání má poněkud odlišná hodnotící kritéria, ale náš přistroj byl vyvíjen především na základě požadavků a preferencí českých (a to bych chtěl zdůraznit) UL pilotů, pro které je náš přístroj určen. Našim cílem rozhodně není konkurovat zavedeným výrobcům v oblasti certifikovaných přístrojů.
Nicméně, jak jsem již zmiňoval v mém minulém příspěvku, tak některé Vaše připomínky, které jsme vyhodnotili jako relevantní, již aplikujeme do nové verze SW. Jedná se například o označení TRK namísto dosavadního HDG, přidání stupnice úhlu náklonu na PFD obrazovku, sjednocení IAS a GS jednotek a možnost zvolení jednotek fpm u VS.
Rád bych také uvedl, že při vývoji byl kladen největší důraz na přesnou indikaci měřených hodnot klonění a klopení (tj. umělého horizontu), což na základě analýzy trhu s necertifikovanými přístroji není úplně samozřejmost. Je to parametr, který se velmi obtížně hodnotí, jelikož to není „papírová“ měřitelná položka. Dle mého názoru je to však parametr nejdůležitější, zhodnotitelný ale až při reálném letu s daným přístrojem. Na základě interních testů a zpětné vazby od zákazníků si dovolím tvrdit, že výsledek se nám v tomto směru povedl, a proto se nebojíme prezentovat i testovací videa pro srovnání.
Co se týče updatu software, tak ten je aktuálně možné provést bezdrátově na počkání na našem domovském letišti. Chápu, že to není dokonalé řešení, ale (minimálně zatím) cílíme pouze na náš český „UL rybníček“. Nicméně již nyní pracujeme na budoucím uživatelsky realizovatelném updatu rovněž prostřednictvím Wifi.
Pavle, UL piloti děkujeme za to, že nějací výrobci se zaujímají i o nás. držíme při vývoji i výrobě palce a nenechte se otrávit " dokonalými " GA piloty. :-)
Je obdivuhodné že takto reagujete na zpětnou vazbu a za to vám patří dík.
Zaměření na VFR, UL piloty vzhledem k absenci certifikace chápu. Ze srovnávacích videí je vidět že to oproti jiným necertifikovaným horizontům reaguje opravdu rychle a i v ustálené zatáčce to nemá snahu se srovnávat. Pokud tam tedy přidáte tu stupnici tak to bude opravdu plnohodnotná a použitelná náhrada horizontu, což u ostatních opravdu málo kdy platí. Některé "horizonty" které se v ustálené zatáčce srovnávají jsou vysloveně nebezpečné a je skvělé že ten váš to nedělá. Máte pravdu, že spolehlivá indikace horizontu je ten nejdůležitější parametr, bez ní je přístroj na škodu.
Jinak myslím že jistá uniformita chování EFIS mezi přístroji určenými na IFR a těmi VFR do UL není na škodu. I pilot létající UL může létat jinou kategorii a mít IR. Chápu že to nebude majorita a tím pádem to má nižší prioritu. Pro tyto piloty může být přesedání mírně matoucí. Do této kategorie patří třeba to chování TRK BUGu, kdy jednou to je BUG a jednou GNSS vedení.
Pokud realizujete uživatelský update FW a budete se o jeho rozvoj starat, tak to opravdu posune přístroj na úplně jinou úroveň. Jen je trochu škoda že jste nevyvedli ven alespoň nějakou sběrnici, bylo by pak možné více přístrojů spojovat a do budoucna přístroje spojovat/zálohovat.
Každopádně ještě jednou děkuji za vstřícný přístup a přeji hodně zdaru.