Osudové motory RB.211
S notnou dávkou nadsázky by se dalo říct, že motory od firmy Rolls-Royce byly pro Tristar jakousi „femme fatale“. Přinášely stroji mnoho výhod, nicméně problémy s nimi spojené mohly celý projekt zadusit. A skutečnost, že se tak stalo víceméně kvůli finanční a nikoliv technické chybě firmy, je dnes už téměř zapomenuta.
RB.211 byly největší, nejtišší a nejefektivnější motory své doby. Ve své původní verzi měl motor tah 186,9 kN s obrovským potenciálem dalšího zvyšování. Při zadání vývoje byly hlavními požadavky snížení specifické spotřeby paliva a úrovně hluku (a kouře) a také zvýšení spolehlivosti a udržovatelnosti ve srovnání s tehdy vyráběnými motory.
Jedinečný tříhřídelový koncept, který byl u těchto motorů použit, dovoloval pracovat každému z kompresorů v optimálních otáčkách a tím dosáhnout maximální efektivity. Například vysokotlaký kompresor je nejúčinnější v otáčkách vysokých, zatímco větší středotlaký kompresor dosahuje maximum výkonu při nižší rychlosti. Největší dmychadlo se otáčí ještě pomaleji pro menší namáhání materiálu a také mnohem menší úroveň generovaného hluku.
Motory měly díky koncepci výrazně méně dílů a z toho plynoucí menší hmotnost, větší spolehlivost a lepší udržovatelnost. Motor byl také (díky kratší spalovací komoře) výrazně kratší než v té době běžné dvouhřídelové jednotky s porovnatelným výkonem. Další z výhod tohoto nového uspořádání byla lepší odezva motorů – rychlou reakci na pozici přípusti, především pak při akceleraci, umožnilo hlavně mechanické oddělení dmychadla od středo- a vysokotlakého kompresoru.
Původně bylo zamýšleno vyrábět lopatky dmychadla o průměru 2,18 metru a obvodovou rychlostí na koncích lopatek okolo 460 m/s z uhlíkového kompozitu „Hyfil“. Avšak vzhledem k tomu, že tento materiál by nevyhověl zkouškám při poškození cizím tělesem (v tomto případě to odneslo kuře), bylo od tohoto záměru ustoupeno a lopatky jsou titanovými výkovky.
Motor byl také unikátní díky své modulární konstrukci – celá jednotka sestávala ze sedmi podsestav. To výrazně zvyšovalo efektivitu údržby. Bylo tak možné vyměnit některé moduly přímo „na křídle“, moduly s otáčivými částmi byly předvyvážené, což umožňovalo rychlou výměnu s minimálními testovacími nároky a až o čtvrtinu byl snížen počet náhradních dílů držených ve skladu.
Dalším z požadavků na konstrukci motorů bylo použití maximálního počtu shodných dílu pro instalaci motorů na různých pozicích na letadle a použití unifikovaných připojení elektrických, hydraulických a palivových vedení. Tím bylo dosaženo možnosti vyměnit motor v čase kratším než tři hodiny.
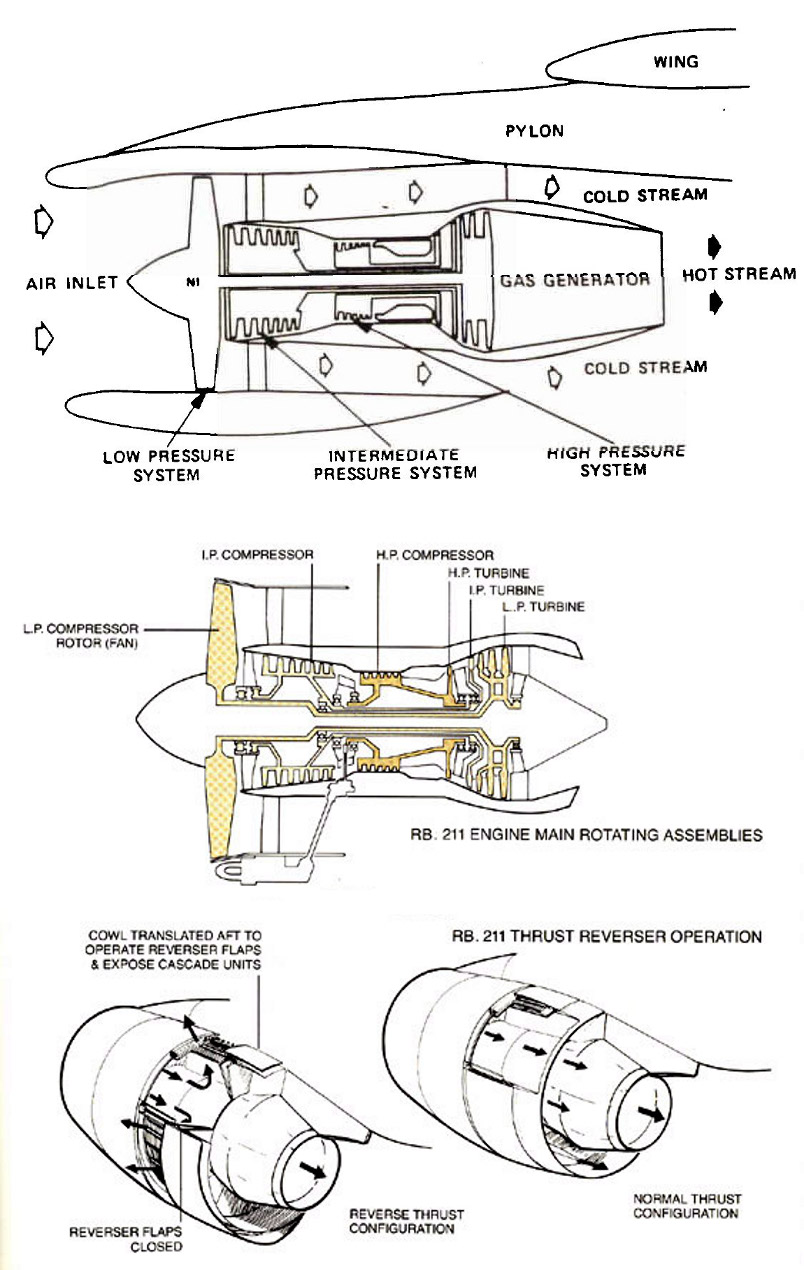
Schematické zobrazení motoru RB.211. Zpětný tah motorů využíval proud vzduchu od dmychadla, které za letu poskytovalo 75% tahu motoru (kliknout pro zvětšení)
Motor RB.211 měl veliký potenciál růstu a z Rolls-Royce udělal jednoho z hlavních dodavatelů proudových motorů pro letectví. Zajímavostí jistě je, že RR se snažil RB.211 nabídnout v šedesátých letech Boeingu, ale úspěšný byl až s motorem verze 524, který byl osazen na B747 a nabízel výrazný přírůstek tahu oproti původním Pratt &Whitney JT9D. V dalších verzích se tento motor stal jedním z nabízených typů pro následné verze B747, B767 a především pro B757. Ve verzi 535 byl dokonce také prvním typem pohonné jednotky západní provenience použité na ruském stroji, a to na Tu-204.
Jeho přímým nástupcem, využívajícím mnoho společných prvků, je obchodně také velmi úspěšný motor Trent, uvedený na trh v devadesátých letech. Motor RB.211 firma RR dodnes nabízí v poněkud (alespoň pro leteckého nadšence) nečekané formě – jako generátor s výkonem 25,2-32 MW, používaný především v těžařském průmyslu.
Hydraulika, která myslí na vše
Jednou z hlavních a obchodně hojně zdůrazňovaných předností Tristaru byl jeho čtyřokruhový hydraulický systém, který byl v porovnání s jinými stroji té doby jedinečný. Všechny čtyři okruhy pracující s tlakem 20,68 MPa (3 000 psi) byly navzájem nezávislé a byly poháněny z motorů – po jednom čerpadle na pravém a levém motoru a dvě čerpadla byla připojena k motoru v trupu.
Okruhy B a C mohly být tlakovány elektrickým čerpadlem, vzduchovým čerpadlem poháněným vzduchem z kteréhokoliv z motorů nebo APU a nebo z pozemního zdroje. Okruhy A a D mohly být natlakovány z okruhu B a C. Toto mnohonásobné jištění umožňovalo absorbovat poruchu jednoho, dvou nebo tří hydraulických okruhů a také splňovalo požadavky standardů pro automatická přistání v kategorii III. Okruh B sloužil pro řídící prvky a brzdy a dokázal fungovat dokonce při výpadku všech tří motorů během letu - pomocí náporové turbínky (RAT – Ram Air Turbine), kterou je možné vysunout za letu.
L-1011 byl vybaven prvky automatického řízení letu, které byly ve své době v civilním letectví velmi pokročilé. Primární ovládací prvky nebyly – striktně vzato – automatické. Přesto byly vybaveny automatizačními prvky, které umožňovaly posádce dosáhnout požadovaných výkonů a bezpečnosti. Předpokladem pro funkci všech ovládacích prvků byl spolehlivý hydraulický a elektrický systém.
Porucha jednoho z hydraulických okruhů umožňovala pokračování letu, porucha dvou okruhů sice znamenala přerušení letu, ale přesto bylo možno let dokončit bez jakékoliv dramatické situace dokonce při výpadku tří hydraulických okruhů. Koncept plovoucího stabilizátoru poskytoval lepší odezvu v řízení a eliminoval případné důsledky špatného vyvážení, které do té doby způsobily nejednu havárii.
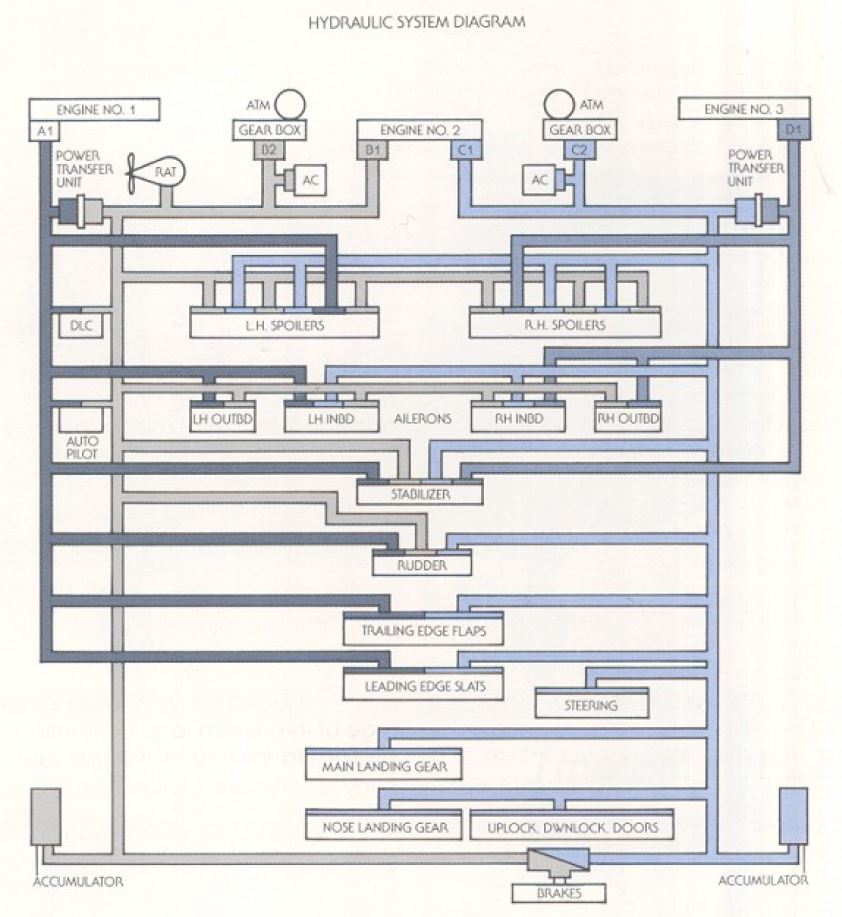
Schéma hydraulického systému (kliknout pro zvětšení)
L-1011 byl prvním dopravním letadlem vybaveným generátorem elektrické energie integrovaným v motoru, který byl vyvinut speciálně pro tuto aplikaci a následně se stal používaným v celém odvětví. Zjednodušený generátor obsahoval vlastní chladicí olejový systém, který pro chlazení vinutí a ložisek používal rozstřikování oleje. Tento způsob chlazení umožňoval, aby byl generátor výrazně menší a lehčí (téměř poloviční) oproti soudobým generátorům, a mohl tak i pracovat ve vysokých otáčkách (okolo 12 000 RPM ve srovnání se 6 000-8 000 RPM u starších typů).
Generátor použitý v L-1011 měl hmotnost 25 kg, zatímco vzduchem chlazené generátory vážily okolo 43 kilogramů. Generátor byl integrovaný na převodovce každého ze tří motorů a čtvrtý generátor byl usazen na APU. Ten sice mohl být použit i za letu, předpokládalo se ale jeho primární použití na zemi.
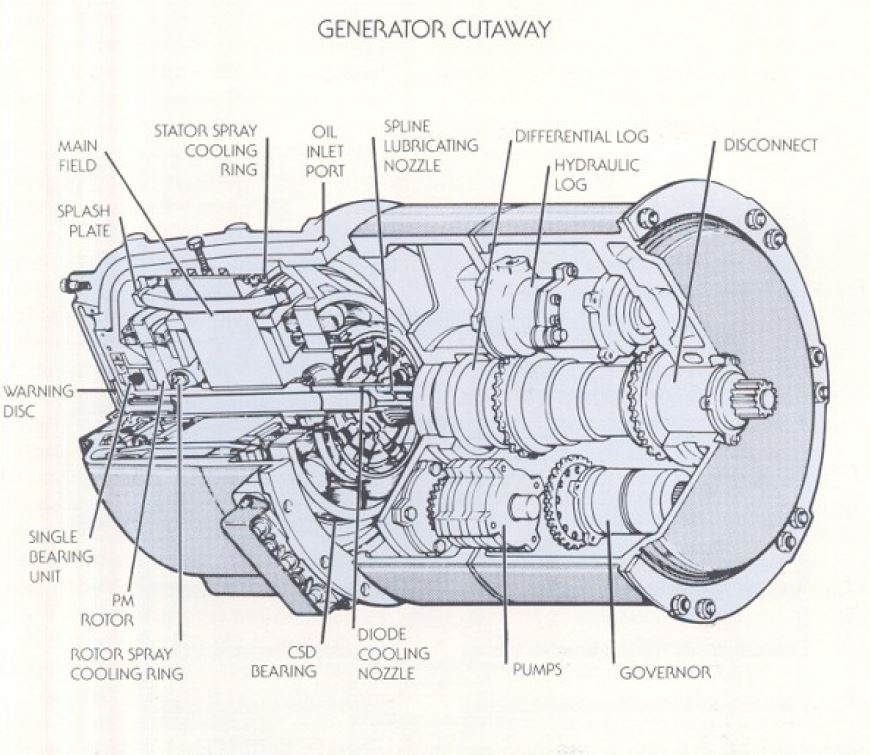
Průřez generátorem elektrické energie (kliknout pro zvětšení)
Čtyři čtvrtiny mozku
Lockheed při vývoji avioniky pro Tristar hojně využíval zkušeností z vojenských strojů. Například systém řízení ve třech osách vycházel ze systému použitého na SR-71 a systém přistání za každého počasí v CAT II a CAT III byl vyvinut pro C-141 a byl také použit na C-5 a Jetstaru. Díky těmto zkušenostem měli inženýři Lockheedu v tyto systémy takovou důvěru, že se neobávali je použít v civilním sektoru. Automatizace letu umožňovala posádce zaměřit se více na sledování parametrů důležitých systémů především v kritických fázích letu, jako je start a přistání, a výrazně tak redukovala zatížení pilotů.
Kontrolní systém se nazýval Avionics Flight Control System (AFCS) a nabízel ruční nebo automatizované režimy ovládání ve všech oblastech letové obálky od startu do přistání. Tento systém sestával z následujících čtyř subsystémů:
- Autopilot-Flight Director System (APFDS) – ovládal klopení a klonění stroje pro stabilizaci a udržování letounu ve vybrané výšce, sklonu a směru. V plně automatickém módu byl Flight Director použit jako monitorovací, v ostatních režimech mohl sloužit jako naváděcí prostředek.
- Stability Augmentation System (SAS). Tento systém ovládal stabilitu stroje (tzv. „yaw damping“). Dva počítače pracující paralelně byly použity pro zvýšenou bezpečnost a omezené zprůměrování zlepšovalo chod servomechanismů.
- Speed Control System (SCS) nabízel režimy „airspeed-auto-throttle“ a „angle-of-attack/auto-throttle“. První z nich byl používán při úvodních fázích přiblížení, zatímco druhý z nich na finále a při vlastním přistání. SCS také odesílal do jednotky APFDS povel pro go around, ovládající klopení.
- Primary Flight Control Electronic System (PFCES) sestával z několika kontrolních, varovných a indikačních prvků a zároveň sloužil jako interface mezi AFCS a ručním ovládáním. Hlavními prvky jsou Trim Augmentation Computer který prováděl manuální i automatické ovládání vyvážení klopení a „Mach-trim“ and „Mach-feel“ kompenzaci. Dále počítač monitoroval pozici řídicích ploch, upozorňoval na stall, ovládal tzv. Direct Lift (DLC), ovládání automatického pozemního brzdného systému a výšková upozornění.
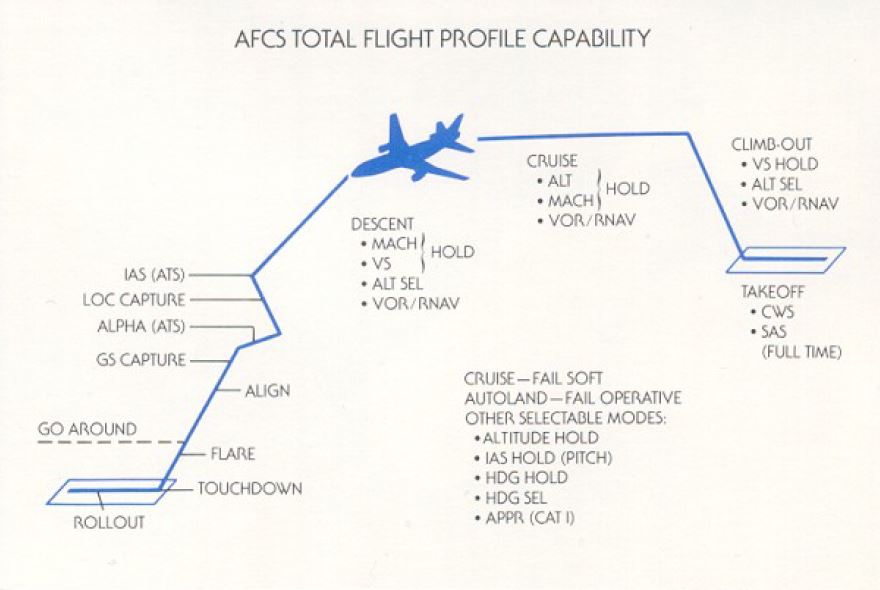
Možnosti řídícího systému AFCS během jednotlivých fází letu
Samo letí, samo přistává
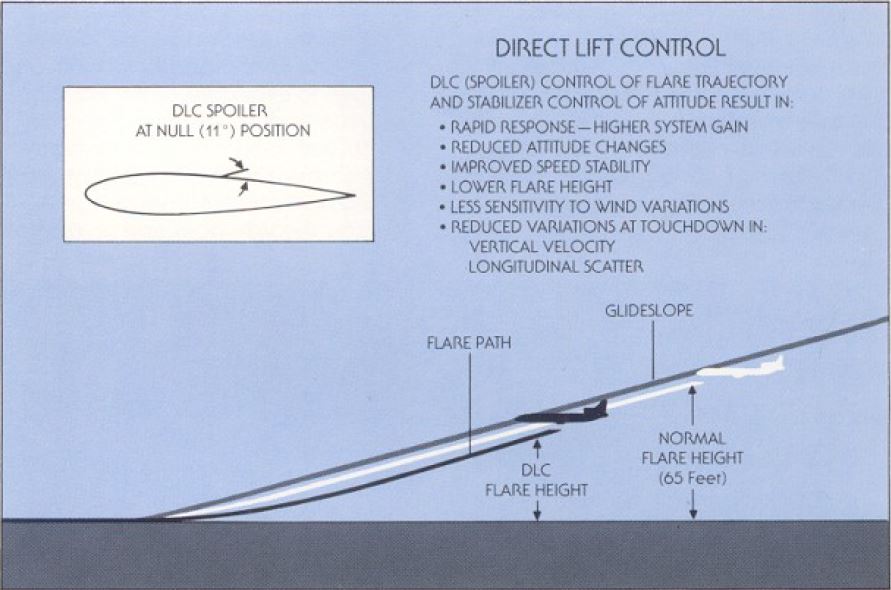
Pro automatické přistání Tristar využíval čtyři výše uvedené systémy společně s tzv. Direct Lift Control (DLC) systémem. Tento systém vylepšoval charakteristiku přiblížení, ať už v automatickém nebo manuálním režimu. DLC vysouval panely na horní části křídla pro změnu vztlaku beze změny klopení. V porovnání s ovládáním vztlaku výškovkou DLC řídil vztlak přímo a s daleko lepší odezvou.
DLC výrazně zlepšilo schopnost udržení sestupové roviny bez zbytečných manévrů, zlepšilo rychlostní stabilitu při současné minimalizaci potřebných změn tahu, umožnilo snížit výšku podrovnání a snížit citlivost vůči poryvům a střihu větru. Byla také zlepšena kvalita přistání odstraněním rozdílů v přistávacích rychlostech a rozptyl bodů dotyku byl výrazně menší.
Pro představu o funkci DLC si popišme dva režimy:
- Autoland Flare Sequence – ve výšce 50 stop nad zemí byl automaticky spuštěn režim podrovnání. Naprogramované přitažení a současné zasunutí DLC spojlerů způsobilo zvýšení vztlaku a následné vyklesání po exponenciální trajektorii. Automatické ovládání přípusti současně zpomalovalo letadlo rychlostí přibližně jeden uzel za sekundu. Bod dotyku pak byl předpokládán při rychlosti klesání cca dvě stopy za sekundu.
- Autoland Rollout Sequence – režim automatického udržení směru byl spuštěn, když byla kola hlavního podvozku ve výšce pěti stop nad zemí. Stroj byl vyrovnán z případného náklonu vlivem bočního větru. Při doteku kol se zemí se pak automaticky vysunuly spojlery a snížením vztlaku tak přenesly velkou část hmotnosti z křídel na podvozek. Následně bylo zahájeno potlačení naprogramovanou rychlostí dvou stupňů za sekundu, díky kterému nedošlo k prudkému dosednutí předního podvozku. Přípustě byly staženy na volnoběh a došlo k vyřazení automatického řízení přípustí, aby bylo možně převést motory do režimu zpětného tahu. Jakmile letadlo začalo zpomalovat, účinnost směrovky se postupně snižovala a směrové řízení přešlo na automatické řízení předního podvozku. Brzdění bylo iniciováno automaticky, přechod motorů na zpětný tah ovšem, jak už bylo naznačeno, museli zahájit piloti.
Převratný Flight Management System
Lockheed byl se svým Tristarem také jedním z pionýrů automatizovaného managementu letů v civilní dopravě. Jeho Flight Management System (FMS) optimalizoval trajektorii letu ve všech třech osách. FMS propojil pro dosažení optimální spotřeby paliva jednotlivé podsystémy automatického řízení letu v jeden paralelně fungující systém. Zjednodušeně by se dalo říct, že FMS ovládá rychlost letounu a tah motorů během všech fází letu. I když bývá často uváděno, že první stroj s FMS byl Boeing 767, lze na toto téma dlouze diskutovat, protože většinu prvků zaváděl už FMS Tristaru certifikovaný FAA v roce 1977.
Z jistého pohledu znamenalo uvedení FMS stejný pokrok jako zavedení prvního autopilota. Se zvyšujícími se požadavky na ekonomiku provozu bylo velmi důležité udržovat optimální cestovní rychlost. Samozřejmě, podobných výsledků je možné dosáhnout i při ručním řízení, nicméně to obecně znamená zvýšenou koncentraci při sledování a řízení tahu motorů, což ve většině případů posádky nebyly ochotné „investovat“.
V tu dobu již sice byly na trhu systémy napomáhající v tomto úkolu zobrazováním doporučených parametrů, nicméně stále to znamenalo řízení ovládacích prvků manuálně, takže problémy se zvýšenou zátěží posádek a neustálými „otravnými“ změnami tahu motorů přetrvávaly. Na základě tohoto stavu se u Lockheedu rozhodli, že vyvíjený systém musí být plně automatický a propojený také se všemi prvky AFCS – v podstatě jakési rozšíření AFCS.
FMS sledoval EPR (Engine Pressure Ratio – poměr tlaku v motoru) a TGT (Turbine Gas Temperature – teplota plynů v turbíně) což byly dva hlavní parametry důležité pro ochranu motorů. Díky tomu byla z posádky sejmuta povinnost neustálého monitorování parametrů motorů, především v turbulentním prostředí, které je cokoliv jen ne stabilní. Dvěma hlavními režimy byly MIN COST a MIN FUEL. Poprvé v historii byla rychlost pro optimální náklady průběžně vypočítávána, zobrazována a přesně ovládána, což v tomto ohledu snížilo zatížení posádek téměř k nule.
V cestovním režimu, v oblastech s neutrální stabilitou poměru rychlost-tah, případně i za letu v lehkých turbulencích, musel FMS dosáhnout udržení nastavené rychlosti bez nadbytečných změn tahu motoru. Tyto změny by byly nejen obtěžující pro posádku i cestující, ale také mohly mít vliv na záruky od výrobce motorů. Pohyby přípustí tak zůstaly téměř nepostřehnutelné. FMS neustále vyhodnocoval změny indikované rychlosti a výšky, a pokud letadlo vlétlo do oblasti se zvýšenou turbulencí, tyto hodnoty začaly být velmi proměnlivé a došlo k zaktivování tzv. Rough Air Mode – režim pro turbulentní podmínky. Systém začal udržovat požadovaný poměr tlaků v motoru (EPR) a v tomto režimu setrval až do doby, než se vnější podmínky uklidnily.
Jiný režim byl použit při sestupu. Sestupový režim (FMS Descent) byl naprogramován pro dosažení libovolného bodu v trojrozměrném prostoru (zeměpisná pozice nebo waypoint) v požadované výšce a rychlosti s motory běžícími na volnoběh. Toho bylo dosaženo „zpětným výpočtem“ od cíle sestupu pro určení optimálního začátku sestupu se započtením uložených parametrů letadla, výšky a vlivu aktuálního větru.
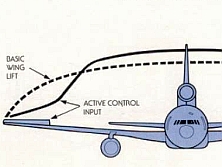
Poslední z významných prvků použitých na L-1011 byl Active Control System zavedený na verzi 500 s prodlouženým doletem. Vzhledem k tomu, že pro dosažení spotřeby bylo zvětšeno rozpětí doplněním optimalizovaných konců křídel, znamenalo to také větší namáhání konstrukce v turbulentních podmínkách. Pro odstranění tohoto potenciálního problému, ale také pro zlepšení komfortu cestujících, přišel Lockheed se systémem, který aktivně přesouval zatížení křídla.
Když akcelerometry na koncích křídel a v trupu vyhodnotily aerodynamické zatížení křídel jako příliš velké, počítač vychýlil vnější křidélka stejnou výchylkou (tedy buď obě nahoru, nebo obě dolů). To mělo za následek odlehčení vnějších částí křídel a přenesení aerodynamického zatížení na jeho vnitřní část. Přesto však křidélka zůstala funkční – pouze s tím, že výchylky požadované ACS byly přičteny k řídícím výchylkám. Pokud byly vysunuty klapky při vzletu nebo přistání, byla vnější křidélka zvednuta asi osm stupňů vzhůru, což opět přesunulo zatížení směrem ke kořenům křídel. V okamžiku, kdy byly klapky zasunuty, křidélka se vrátila do své „středové“ (z pohledu ACS) pozice dva stupně směrem dolů.
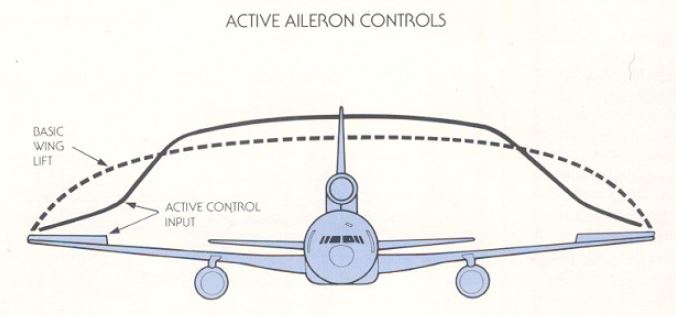
Active Control System – znázornění přerozdělování vztlaku
Všechny tyto prvky udělaly z Tristaru jeden z nejoblíbenějších strojů pro ty, kteří je mohli používat. A i když si znovu přiznáme, že Tristar obchodně úspěšný příliš nebyl, jeho přínos pro civilní letectví byl v tomto ohledu velmi výrazný.





